رنج فایندر (نحوه عملکرد – نگهداری صحیح – راهنمای خرید)

رنج فایندر
(نحوه عملکرد – نگهداری صحیح – راهنمای خرید)

با شناخت بهتر عملکرد فاصله یاب ها ، می توانید آنها را با مهارت بیشتری به کار بگیرید. این مقاله باید شما برای خرید مناسب و نگهداری صحیح و استفاده کم خطا تر رنج فایندر ها مجهز کند .
رنج فایندر چیست ؟
نوعی دوربین با قابلیت اندازه گیری فاصله سوژه ای که بوسیله دوربین دیده می شود این دوربین در محدوده و برد تعیین شده بیننده را قادر می سازد فاصله تا هدف مورد نظر را به صورت یک عدد دیجیتالی روی صفحه تصویر دوربین مشاهده نماید .
برخی مدل های فاصله یاب ها می توانند سرعت و زاویه سوژه مورد مشاهده در دوربین را نیز اندازه گیری نمایند .
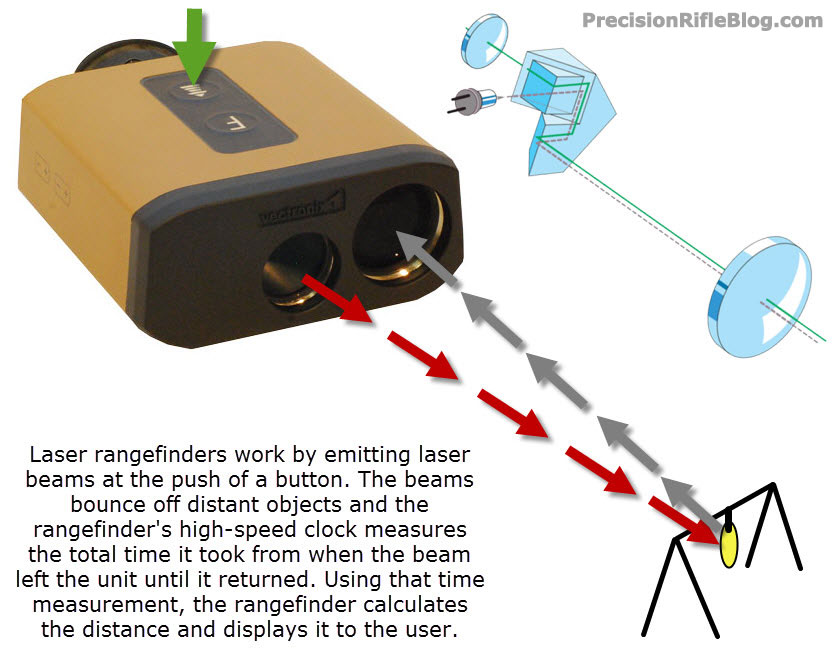
آشنایی با مسافت یاب ها و نحوه عملکرد آنها
فاصله یاب های لیزری (LRF) همه با استفاده از یک مفهوم اساسی یکسان کار می کنند. فاصله سنج با فشار یک دکمه پرتوهای لیزر را ساطع می کند. این پرتوها به سمت اجسام دور پرتاب می شوند و از آنها نیز به سمت مسافت یاب پرتاب می شوند و توسط یک ساعت تایمرسنج با سرعت بسیار بالا فاصله کل زمان را از زمان خروج پرتوها از واحد تا بازگشت آنها اندازه گیری می کند. از آنجا که ما می دانیم پرتو با چه سرعتی در حال حرکت هستند (سرعت نور) ، واحد می تواند به سادگی از آن اندازه گیری زمان برای محاسبه مسافت طی شده استفاده کند و سپس فاصله را به کاربر نشان می دهد.
اگرچه فاصله یاب های لیزری همه با یک روش کار می کنند ، اما در مورد جزئیات فضای زیادی برای نوآوری وجود دارد. من به تازگی 8 مورد از برترین مسافت یاب های لیزری مورد استفاده برای شکار و تیراندازی در فاصله دور را بررسی کردم و از میزان واریانس عملکرد آنها شوکه شدم. میزان کارایی آنها به عوامل زیادی بستگی دارد ، اما در اینجا بزرگترین تمایز بین فاصله یاب ها هنگام استفاده از آنها برای تیراندازی یا شکار از راه دور است. من در طول مقاله بیشتر این موارد را با جزئیات اشاره می کنم.

توانایی تشخیص نقطه روی هدف
توانایی تشخیص نقطه به معنی نوری با کیفیت خوب و بزرگنمایی مناسب است. اگر نتوانید هدف را پیدا کنید ، نمی توانید رنج آن را بزنید . بیشتر تیراندازان بزرگنمایی 8 یا 10 برابر را انتخاب می کنند. در حین انجام آزمایشات میدانی در فاصله یاب ها ، ما با استفاده از بزرگنمایی 5 برابر ، هدفی را برای مسافت یابی جستجو کردیم و فکر کردیم همه اهداف را یافته ایم. با این حال ، پس از جستجوی مجدد با بزرگنمایی 10 برابر ، بلافاصله یک هدف دیگر را مشاهده کردیم که با بزرگنمایی 5x به طور کامل از دست داده بودیم.اما همانطور که در پست های دیگر اشاره کردم ، کیفیت اپتیک واقعا گاهی اوقات می تواند بزرگنمایی را جبران کند. من می توانم جزئیات بیشتری را در هدف 2000 یاردی با استفاده از رنج فایندر 45x Leica نسبت به رنج فایندر 60x Bushnell مشاهده کنم. نکته این است که اپتیک با کیفیت و بزرگنمایی مناسب هر دو اهمیت دارند و شما نمی توانید یکی یا دیگری را کاملاً نادیده بگیرید.
توانایی دریافت انرژی لیزر بر روی هدف
این امر ارتباط زیادی با واگرایی پرتو دارد ، که میزان “متمرکز شدن” پرتو است. همچنین ممکن است در کیفیت پالس های لیزر منتقل شده ، از نظر نوع ، طول موج و وضوح ، تفاوت وجود داشته باشد … اگرچه تعیین این موارد بسیار دشوار است.
اندازه دیافراگم گیرنده
این اندازه دهانه گیرنده نور است که خوانش های برگشتی را گرفته و به سنسور واقعی ارسال می کند. دیافراگم بزرگتر می تواند تأثیر زیادی در میزان بازده دیتا ها که سنسور قادر به جمع آوری است داشته باشد ، که می تواند به دستگاه اجازه دهد در فواصل دورتر نیز عمل کند و همچنین می تواند به وضوح/دقت اندازه گیری ها در فاصله کوتاهتر نیز کمک کند. وضوح رنج فایندر چگونه دستگاه نتایج را تجزیه و تحلیل می کند – تفاوت های زیادی بین نحوه تفسیر فاصله یاب ها هنگام دریافت و قرائت ها وجود دارد و برخی از آنها بسیار باهوش تر از دیگران هستند. مدلهای قدیمی به سادگی اولین پالس ارسالی را قرائت و نشان می داد ، اما بسیاری از دستگاه های برد یاب مدرن از “فناوری چند پالس” استفاده می کنند. این روش صد ها یا حتی هزاران پالس کوچک لیزری را در مدت زمان بسیار کوتاهی منتشر می کند. سپس حجم وسیعی از نمونه ها را جمع آوری می کند ، سپس این نتایج را برای شناسایی نقاط دورافتاده از هدف مانند قلم مو ، مه ، باران که باید آنها را نادیده بگیرد و تعیین میزان قرائتی که قصد دارید با اطمینان بیشتری انجام دهید ، تجزیه و تحلیل می کند. پرتوهای بیشتر ساطع شده نیز می تواند به شما کمک کند که از یک هدف کوچک و/یا غیر بازتاب کننده قرائت کنید. منطق و الگوریتم های مورد استفاده برای تعیین اینکه چه چیزی به کاربر نمایش داده شود ، می تواند تأثیر بسزایی در عملکرد خوب فاصله سنج داشته باشد.
واگرایی پرتو – توانایی دریافت انرژی لیزر به صورت هدفمند
واگرایی پرتو (Beam divergence) ، که به آن پراکندگی پرتو (beam dispersion) نیز گفته می شود ، اندازه گیری زاویه ای (معمولاً بر حسب میلیمتر) از میزان “متمرکز شدن” پرتو لیزر است. واگرایی پرتوهای کوچکتر در بیشتر مواقع دقت مسافت سنجی بیشتر و فاصله قابل مسافت یابی بیشتر را فراهم می کند. با فاصله یاب های با کیفیت مشابه ، واگرایی پرتو می تواند شاخص اصلی عملکرد متفاوت باشد. اگر بتوانید 100٪ انرژی لیزر را بر روی هدف مورد نظر متمرکز کنید ، شانس بسیار بیشتری برای خواندن چندین بار از آن خواهید داشت. با این حال ، اگر یک فاصله سنج در نحوه تجزیه و تحلیل قرائت ها هوشمند باشد ، می تواند کمی از تفاوت فاصله ایده آل را جبران کند و در مسافت دورتری نیز مسافت یابی نماید … بنابراین بر خلاف تصور رایج ، واگرایی لیزر تنها عاملی نیست که باید مورد توجه قرار گیرد.
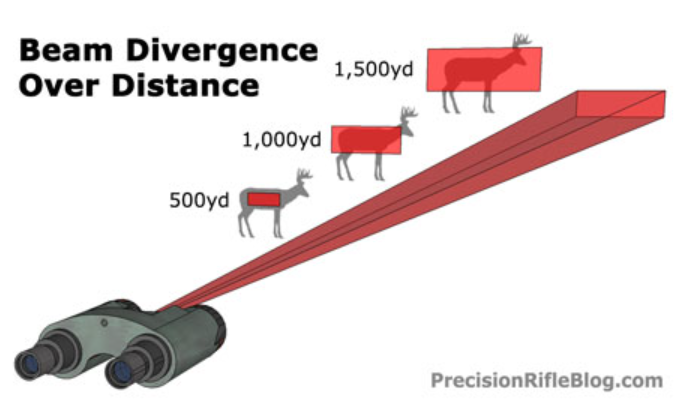
برای درک واگرایی پرتو ، به فکر شلیک دو تفنگ به هدفی در فاصله 1000 یاردی باشید. میانگین اندازه گروپ یکی از این تفنگها 2.5 اینچ در 100 یارد و دیگری به طور متوسط ½ اینچ است. کدام یک از آنها شانس بیشتری برای رسیدن به هدف مورد نظر در 1000 یارد به شما می دهد؟ حالا اگر می خواهید به هدف 12 اینچی در 300 یارد برسید ، هر دو کارآمد هستند. اما وقتی فاصله را بیشتر می کنید یا اندازه هدف را کوچک می کنید ، واگرایی کوچکتر بحرانی می شود. این امر در مورد واگرایی پرتو در فاصله یاب های لیزری هم صادق است. اگر اهداف نسبتاً بزرگی (اندازه گوزن ها) در محدوده های زیر 500 یارد دارید … احتمالاً نیازی به نگرانی در مورد واگرایی پرتو نیست. اما با بزرگتر یا کوچکتر شدن اهداف ، واگرایی پرتو به سرعت برای محدوده دقیق حیاتی می شود.
من درباره واگرایی تیرها به اندازه 4 * 2 میل شنیده ام ، و یک مدل درجه نظامی که آزمایش کرده بودم کمتر از 0.3 میلی متر بود … بنابراین واریانس زیادی در آنجا وجود دارد. در اینجا یک نمودار نشان داده شده است که چقدر اختلاف فاصله پرتو در 1000 یارد می تواند باشد.
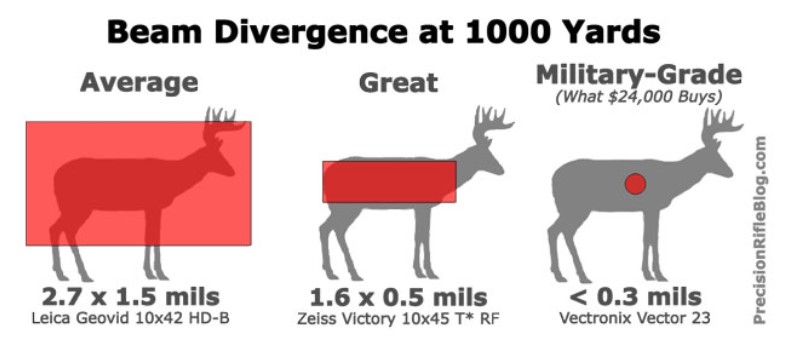
من با نماینده ای از Vectronix صحبت می کردم ، و ما هر دو معتقد بودیم که واگرایی پرتوها در حدود m1.5*0.5 احتمالاً برای اهداف در محدوده 500 تا 2000 یارد ایده آل است ، اگرچه این یک قانون نیست.
عوامل موثر بر محدوده مسافت یابی
عوامل متعددی بر میزان عملکرد خوب یک فاصله سنج تأثیر می گذارد ، از جمله ویژگی های هدف ، شرایط جوی و پشتیبانی فاصله سنج ، و همه آنها در حداکثر فاصله مسافت سنجی نقش دارند. در اینجا یک نمودار بسیار مفید ارائه شده توسط Vectronix است که نشان دهنده این مورد است:
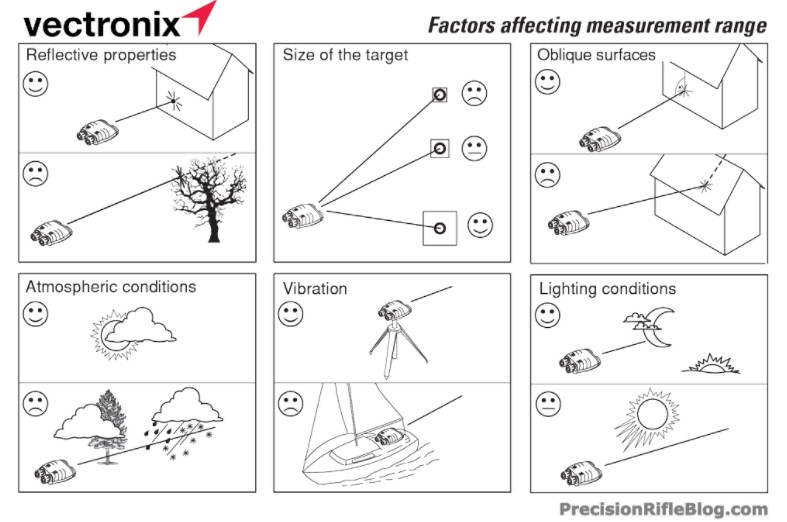
هنگامی که تولیدکنندگان یک فاصله سنج ، آن را برای حداکثر برد 1000 یارد یا 1 مایل تبلیغ می کنند ، معمولاً می توانید آن را به این معنا ترجمه کنید که احتمال دارد در آن فاصله بتوانید مسافت سنجی کنید ، اما فقط در شرایط کاملاً ایده آل (نور مناسب ، سه پایه ، روی یک هدف بسیار بزرگ و منعکس کننده). طبق تجربه من ، شما معمولاً فقط در 70-80 درصد از حداکثر فاصله اعلام شده در اکثر شرایط روز (نور روشن) بر روی هدف انعکاسی با سایز 2MOA می توانید مسافت سنجی کنید.
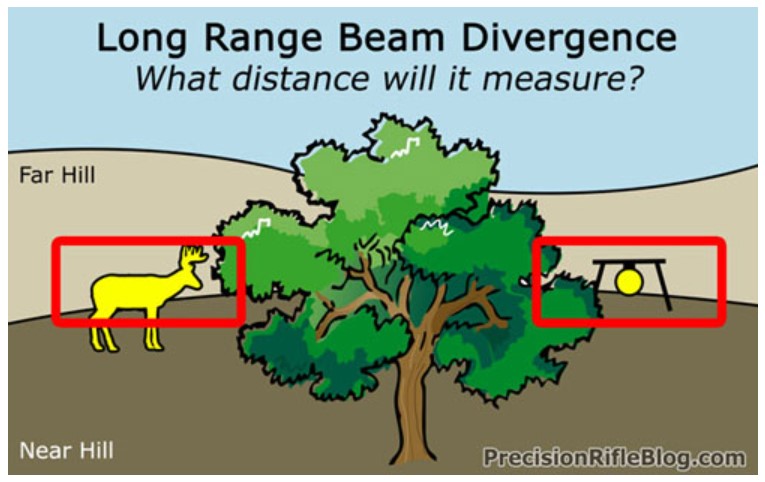
درک آنچه “مسافت یاب” می بیند “
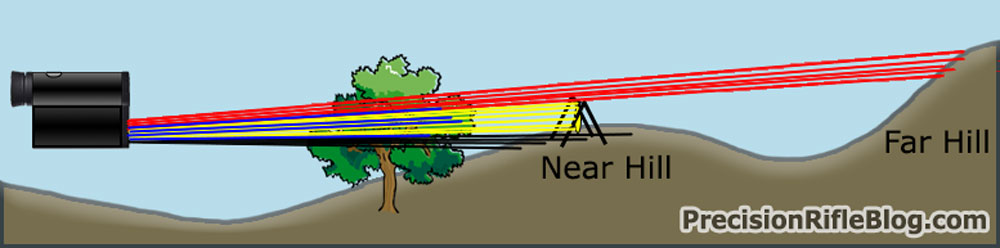
ساده ترین راه برای درک نحوه عملکرد فاصله یاب ها از طریق یک مثال سریع است. نمودار زیر چند موقعیت سخت مختلف را نشان می دهد ، که هر یک از اهداف زرد با یک کادر قرمز مشخص شده است که نشان دهنده واگرایی پرتو مربوطه هنگام تلاش برای مسافت یابی آن هدف است. می بینید که در هر موقعیتی احتمالاً پرتو ها به درخت ، هدف ، تپه نزدیک و تپه دور برخورد و برگشت داده می شود.
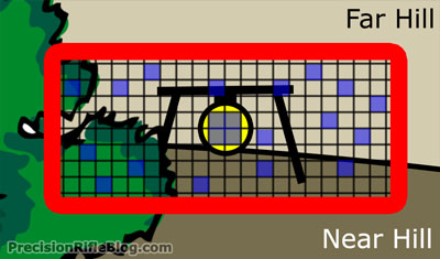
چند تصویر بعدی نشان می دهد که مسافت یاب چه چیزی را می تواند “ببیند” وقتی سعی می کند یکی از سناریوهای سخت ما را مسافت یابی کند . نمودار اول دارای شبکه ای کمتر از 200 باکس است. می توانید به جای تمام پرتوهای ساطع شده از فاصله سنج فکر کنید. کادرهای آبی پرتوهای منعکس شده در فاصله سنج را نشان می دهد که می تواند به عنوان خوانش ثبت شود. باکس هایی که به رنگ آبی مشخص نشده اند به این معنی است که فاصله یاب از آن پرتو بازخوانی نمی کند ، که ممکن است به دلیل مواردی مانند بازتاب ضعیف (به عنوان مثال پرتو از درخت به خوبی یک هدف فلزی منعکس نمی شود) و اشیاء زاویه دار باشد (به عنوان مثال تپه ها در زاویه کم عمق از کاربر ، به جای عمود مانند هدف). توجه: این مثال فقط برای نشان دادن نظریه و مفهوم نحوه عملکرد فاصله یاب ها است و یک مثال ساده است.
در اینجا یک نمای جانبی از همان هدف است که نشان می دهد خواندن فاصله سنج دریافت شده ، و آنچه که این پرتو ها به آن برخورد کرده اند .
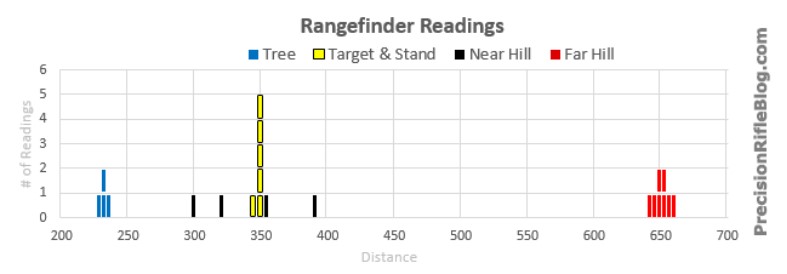
در کمتر از نیم ثانیه ، مسافت یاب همه قرائت ها را دریافت می کند و یک نمودار از این قرائت ها مشابه آنچه در زیر نشان داده شده است ایجاد می کند. این اساساً نشان دهنده این است که مسافت یاب “می بیند” یا چه داده هایی در اختیار دارد که می تواند در مورد فاصله نمایش داده شده برای کاربر تصمیم گیری کند.
چگونه یک Rangefinder نتایج را تجزیه و تحلیل می کند و تصمیم می گیرد چه چیزی را نمایش دهد
اینجاست که جالب می شود. تعدادی از رویکردها وجود دارد که می توان از فاصله یاب ها استفاده کرد تا مشخص شود کدام یک از قرائت ها باید نمایش داده شود. در اینجا چند مورد از رایج ترین آنها آورده شده است.
- خوانش اول – این نحوه عملکرد فاصله یاب های قدیمی است ، و هنوز تعداد کمی از آنها از این روش ساده استفاده می کنند. هنگامی که واحد اولین پرتو منعکس شده به آن (نزدیکترین شی) را دریافت می کند ، فاصله مربوطه را محاسبه و نمایش می دهد. در مثال ما ، این رویکرد 225 یارد را نشان می دهد.
- نزدیکترین لبه – این شبیه شماره 1 است ، اما به جای نزدیکترین قرائت به دنبال نزدیکترین قله است. این رویکرد می تواند به حذف فیلترهای قرائت “کاذب” از مواردی مانند باران یا مه ، که بیشتر در الگو پراکنده شده اند کمک کند. ممکن است یک “آستانه” دارای کد سخت وجود داشته باشد که چیزی شبیه به آن را بیان کند: “به دنبال اولین لبه باشید که حداقل دو خوانش را در یک فاصله داشته باشد”. در مثال ما ، این رویکرد 230 یارد را نشان می دهد.
- دورترین منعکس کننده– این مجموعه کل قرائت ها را بررسی می کند و بزرگترین قله خوانش ها را در همان فاصله پیدا می کند و فرض می کند که همان چیزی است که شما قصد دارید مسافت یابی کنید. این به طور کلی یک رویکرد خوب است ، اما به ویژه هنگام محدود کردن اهداف بازتابنده که عمود بر کاربر هستند مفید است. در مثال ما ، این رویکرد 350 یارد (هدف مورد نظر ما) را نشان می دهد.
- بزرگترین دسته منعکس شده از پرتوها– این رویکرد همچنین مجموعه ای از خواندن ها را تجزیه و تحلیل می کند و به دنبال بزرگترین گروه پرتوها است. در مثال ما ، می توانید به 350 یارد نگاه کنید و ببینید که گروهی از 7 قرائت در کنار هم وجود دارد (اینها به هدف ، پایه هدف و زمین نزدیک آن برخورد می کند). اما ، اگر به 650 یارد نگاه کنید ، گروهی از 8 قرائت در کنار یکدیگر وجود دارد (اینها به تپه دور برخورد می کنند). بنابراین این رویکرد 650 یارد را نشان می دهد.
- دورترین لبه – این شبیه شماره 2 است ، اما به دنبال قله ای است که دورترین نقطه است. این رویکرد هنگام تلاش برای مسافت یابی کردن هدفی که تا حدی با اجسام مزاحم پوشانده شده است مفید است. در مثال ما ، این رویکرد 660 یارد را نشان می دهد.
آیا عجیب نیست که چگونه رنج فایندر می تواند راه دور را تفسیر کند؟ واقعیت این است که هیچ یک از رویکردها در هر شرایطی کامل نیستند. من عمداً یک مثال سخت انتخاب کردم که نقاط ضعف هر رویکرد را نشان می دهد ، و حتی اگر رویکرد شماره 3 محدوده مورد نظر را در اختیار ما قرار داد ، من می توانم سناریوهای دیگری را در نظر بگیرم که در آن نتیجه صحیح را نشان نمی دهد ( مانند اگر هدف منعکس کننده یا کاملاً عمود بر کاربر نبود).
اکثر فاصله یاب ها به سختی کدگذاری شده اند که همیشه از یک رویکرد واحد استفاده کنند (معمولاً یا شماره 1 یا شماره 2) ، اما چند مدل وجود دارد که در تجزیه و تحلیل خوانش ها بسیار هوشمندتر می شوند.
به کاربر اجازه دهید بهترین روش را مشخص کند
دوربین دوچشمی Bushnell Fusion سه حالت مختلف را در اختیار کاربر قرار می دهد:
عادی-این شبیه به روش شماره 3 یا شماره 4 است و بهترین روش آنها است.
BullsEye – این شبیه به روش شماره 2 است. در دفترچه راهنمای بوشنل آمده است: “این حالت پیشرفته امکان دستیابی آسان به اهداف کوچک و باز را بدون دسترسی ناخواسته به اهداف پس زمینه که دارای قدرت سیگنال قوی تر هستند ، می دهد. هنگامی که بیش از یک جسم به دست آمد ، فاصله جسم نزدیکتر نمایش داده می شود. “
Brush – این شبیه به روش شماره 5 است. در دفترچه راهنمای بوشنل آمده است: “این حالت پیشرفته اجازه می دهد تا اشیایی مانند قلم مو و شاخه های درخت نادیده گرفته شوند به طوری که فقط فاصله از اشیاء پس زمینه نمایش داده شود. هنگامی که بیش از یک شیء به دست آمد ، فاصله شیء بعدی نمایش داده می شود. “
به نظر من ، این “حالت های پیشرفته” یک ویژگی نوآورانه است و چیزی است که سایر تولید کنندگان اپتیک باید به آن توجه کنند. اساساً این به کاربر امکان می دهد “اشاره” کند که چه روشی به آنها بهترین شانس را می دهد تا مسافت را در هدف مورد نظر خود بدست آورند. در نهایت ، کاربر در مورد موقعیت خاصی که سعی می کند محدوده آن را بیشتر بداند ، به عنوان مثال اگر براش هایی تا حدی هدف را پنهان کرده است یا سعی می کنند یک هدف بسیار کوچک را مسافت یابی کنند. این حالت ها به سادگی راهی را برای آنها فراهم می کند تا این اطلاعات را به فاصله یاب منتقل کنند تا بتواند نتایج را بهتر تفسیر کند.
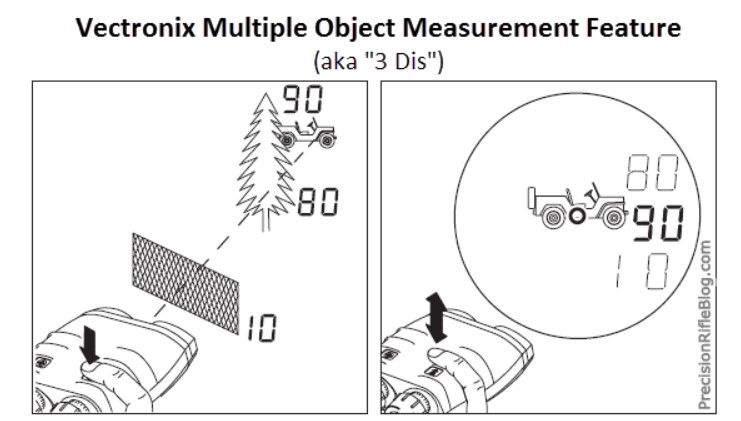
من به تازگی آزمایشات میدانی جامعی را روی چند دوربین دو چشمی فاصله سنج انجام دادم و سعی کردم در تصویر زیر هدف را مسافت یابی کنم. هدف یک مربع بزرگ 30 اینچی است که مانند یک لوزی تبدیل شده است و فقط 360 یارد فاصله داشت. چند شاخه که تا حدی هدف را پنهان کرده بودند در 103 یاردی وجود داشت. من فاصله یاب های ساخته شده توسط Leica ، Zeiss ، Vectronix ، Bushnell و Leupold را امتحان کردم و تقریباً همه آنها فقط 103 یارد به من قرائت می کردند. دوربین جدید Bushnell Fusion 1 Mile در حالت قلم مو بیشتر اوقات به من 360 متر می خواند. و اگرچه مدل Vectronix Terrapin تنها سوژه اولیه 103 یاردی را ارائه می دهد ، دوربین دوچشمی Vectronix Vector 23 هر بار محدوده 360 یاردی را ارائه می دهد. (توجه: Vectronix Terrapins دارای ویژگی “3 DIS” است که بعداً به آن می پردازم)

به کاربر اجازه دهید مطالب را کاوش کند
Vectronix دارای ویژگی در همه فاصله یاب های خود به نام “اندازه گیری چند شیء – Multiple Object Measurement” (همچنین به عنوان “3 DIS” شناخته می شود) است که می توانید با یک اندازه گیری 3 قرائت برتر را نمایش دهید. این به طور خودکار فاصله ای را که فکر می کردید می خواهید انجام دهید برجسته می کند ، اما دومین و سومین قرائت قوی را نیز به شما نشان می دهد. به عنوان مثال درخت در فاصله 250 یارد و یک جیپ در 100 یارد و یک ساختمان در 1000 یارد را نمایش می داد.

https://irbr.ir/3d0OGT
کپی آدرس